Then we can connect to our database. The default user name is neo4j and you get to pick the password when creating the database:
from neo4j import GraphDatabase
URI = "neo4j://localhost"
AUTH = ("neo4j", "password")
with GraphDatabase.driver(URI, auth=AUTH) as driver:
driver.verify_connectivity()
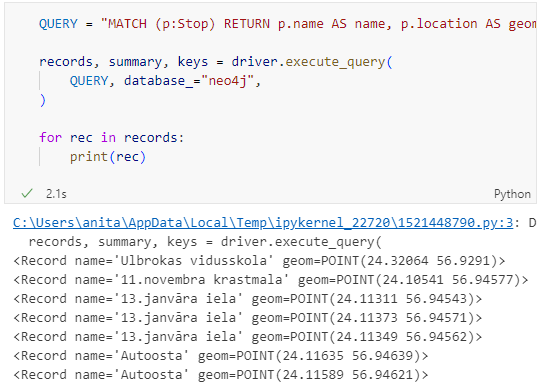
Once we have confirmed that the connection works as expected, we can run a query:
QUERY = "MATCH (p:Stop) RETURN p.name AS name, p.location AS geom"
records, summary, keys = driver.execute_query(
QUERY, database_="neo4j",
)
for rec in records:
print(rec)
Nice. There we have our GTFS stops, their names and their locations. But how to put them on a map?
import geopandas as gpd
import numpy as np
with driver.session(database="neo4j") as session:
tx = session.begin_transaction()
results = tx.run(QUERY)
df = results.to_df(expand=True)
df = df[df["geom[].0"]>0]
gdf = gpd.GeoDataFrame(
df['name'], crs=4326,
geometry=gpd.points_from_xy(df['geom[].0'], df['geom[].1']))
print(gdf)
tx.close()
Since some of the nodes lack geometries, I added a quick and dirty hack to get rid of these nodes because — otherwise — gdf.explore() will complain about None geometries.
This autumn, from September to November, 84 new plugins have been published in the QGIS plugin repository.
Here’s the quick overview in reverse chronological order. If any of the names or short descriptions piques your interest, you can find the direct link to the plugin page in the table below:
QGIS plug-in designed to publish and manage the publication of projects in a QWC2 instance. The plugin allows you to publish projects, delete projects and view the list of published projects.
The plugin prompts the user to select the LLPG data layer from the Layers Panel and enter a postcode. The plugin will search for the postcode, if found, the canvas will zoom to all the LLPG points in the postcode.
KICa, is QGIS plugin Kan Imagery Catalog, developed by Kan Territory & IT to consult availability of images in an area in an agnostic way, having as main objective to solve the need and not to focus on suppliers. In the beginning, satellite imagery providers (free and commercial) are incorporated, but it is planned to incorporate drone imagery among others.
Displays the PV installation potential for residential properties. The pv_area layer is derived from 1m LIDAR DSM, OSMM building outlines and LLPG data.
a SAM (facebook segment anything model and its decendants) based geographic information extraction tool just by interactive click on remote sensing image, as well as an efficient geospatial labeling tool.
PL: Wtyczka otwiera rządowy geoportal w tej samej lokacji w której użytkownik ma otwarty canvas QGIS-a. EN: The plugin opens the government geoportal in the same location where the user has the QGIS canvas open (Poland only).
Este nombre combina el algoritmo k-means que se utiliza para el agrupamiento (K) con “Landsat 8”, que es el tipo específico de imágenes satelitales utilizadas, y “Slicer”, que hace referencia al proceso de segmentación o corte de la imagen en diferentes clusters o grupos de uso del suelo.
Este complemento fue diseñado para automatizar y optimizar la obtención de índices SAVI, NDVI y SIPI, así como la realización de correcciones atmosféricas en imágenes Landsat 8.
This plugin provides tools for clustered and hierarchical visualization of vector layers, creation of Relief Shading and management of scales using zoom levels.
Fonctions permettant de définir la surface cadastrale des lots de chasse et d’extraire la liste des parcelles concernées par chaque lot de chasse, sous forme de fichier Excel®.
Create common grid squares used in Japan. 日本で使われている「標準地域メッシュ」および「国土基本図図郭」を作成できます。また、国勢調査や経済センサスなどの「地域メッシュ統計」のCSVファイルを読み込むこともできます。プロセッシングツールボックスから利用できます。
Nimbo’s Earth Basemaps is an innovative Earth observation service providing cloud-free, homogenous mosaics of the world’s entire landmass as captured by satellite imagery, updated every month.
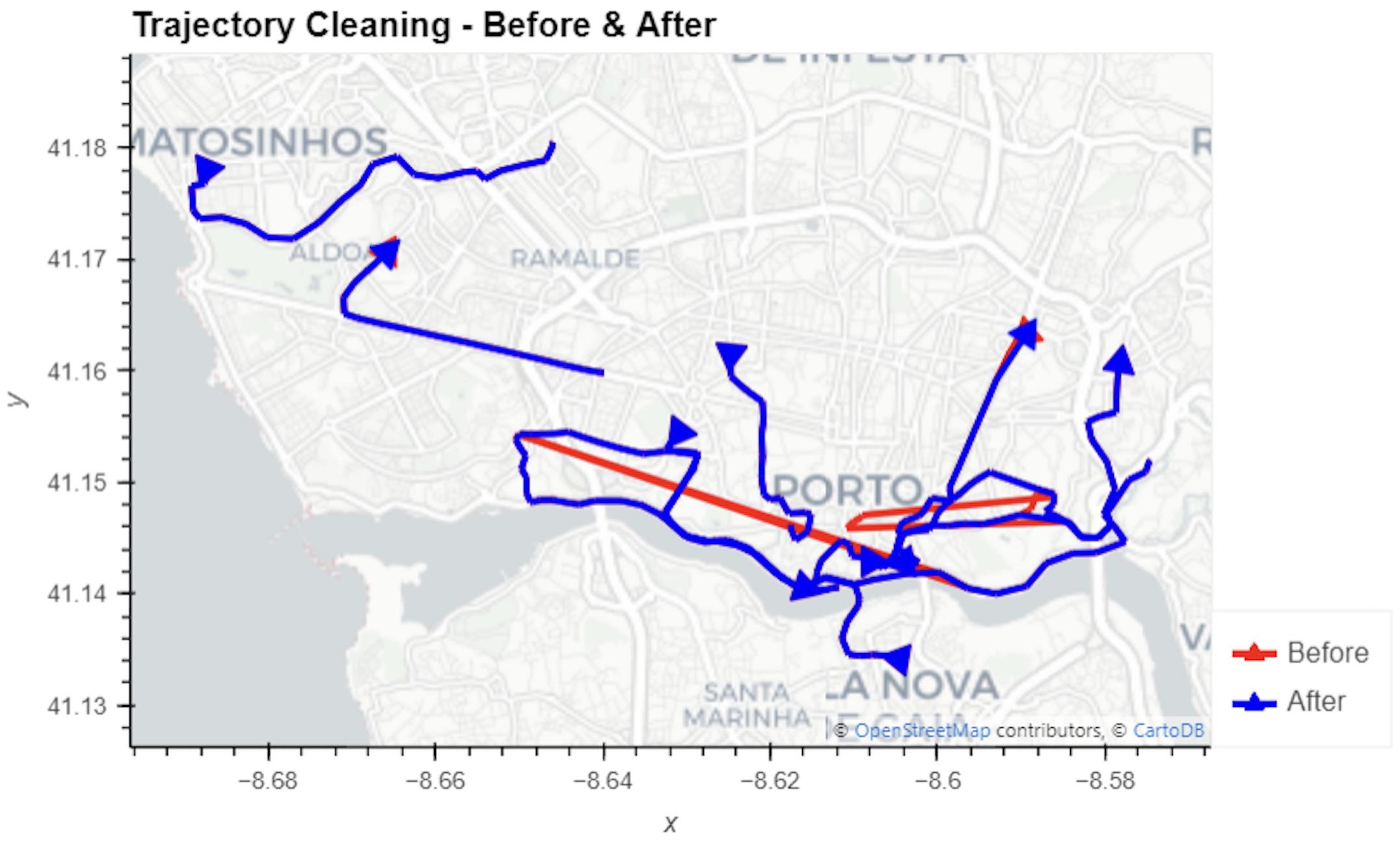
written together with my fellow co-authors and EMERALDS project team members Argyrios Kyrgiazos and Helen McKenzie.
In this blog post, we walk you through a trajectory hotspot analysis using open taxi trajectory data from Kaggle, combining data preparation with MovingPandas (including the new OutlierCleaner illustrated above) and spatiotemporal hotspot analysis from Carto.
In a recent post, we looked into a graph-based model for maritime mobility data and how it may be represented in Neo4J. Today, I want to look into another type of mobility data: public transport schedules in GTFS format.
Since a GTFS export is basically a ZIP archive full of CSVs, we will be making good use of Neo4Js CSV loading capabilities. The basic script for importing the stops file and creating point geometries from lat and lon values would be:
LOAD CSV with headers
FROM "file:///stops.txt"
AS row
CREATE (:Stop {
stop_id: row["stop_id"],
name: row["stop_name"],
location: point({
longitude: toFloat(row["stop_lon"]),
latitude: toFloat(row["stop_lat"])
})
})
This requires that the stops.txt is located in the import directory of your Neo4J database. When we run the above script and the file is missing, Neo4J will tell us where it tried to look for it. In my case, the directory ended up being:
So, let’s put all GTFS CSVs into that directory and we should be good to go.
Let’s start with the agency file:
load csv with headers from
'file:///agency.txt' as row
create (a:Agency {
id: row.agency_id,
name: row.agency_name,
url: row.agency_url,
timezone: row.agency_timezone,
lang: row.agency_lang
});
… Added 1 label, created 1 node, set 5 properties, completed after 31 ms.
The routes file does not include agency info but, luckily, there is only one agency, so we can hard-code it:
load csv with headers from
'file:///routes.txt' as row
match (a:Agency {id: "rigassatiksme"})
create (a)-[:OPERATES]->(r:Route {
id: row.route_id,
shortName: row.route_short_name,
longName: row.route_long_name,
type: toInteger(row.route_type)
});
… Added 81 labels, created 81 nodes, set 324 properties, created 81 relationships, completed after 28 ms.
From stops, I’m removing non-existent or empty columns:
load csv with headers from
'file:///stops.txt' as row
create (s:Stop {
id: row.stop_id,
name: row.stop_name,
location: point({
latitude: toFloat(row.stop_lat),
longitude: toFloat(row.stop_lon)
}),
code: row.stop_code
});
… Added 1671 labels, created 1671 nodes, set 5013 properties, completed after 71 ms.
From trips, I’m also removing non-existent or empty columns:
load csv with headers from
'file:///trips.txt' as row
match (r:Route {id: row.route_id})
create (r)<-[:USES]-(t:Trip {
id: row.trip_id,
serviceId: row.service_id,
headSign: row.trip_headsign,
direction_id: toInteger(row.direction_id),
blockId: row.block_id,
shapeId: row.shape_id
});
… Added 14427 labels, created 14427 nodes, set 86562 properties, created 14427 relationships, completed after 875 ms.
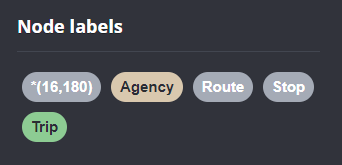
Slowly getting there. We now have around 16k nodes in our graph:
Finally, it’s stop times time. This is where the serious information is. This file is much larger than all previous ones with over 300k lines (i.e. times when an PT vehicle stops).
:auto
load csv with headers from
'file:///stop_times.txt' as row
CALL { with row
match (t:Trip {id: row.trip_id}), (s:Stop {id: row.stop_id})
create (t)<-[:BELONGS_TO]-(st:StopTime {
arrivalTime: row.arrival_time,
departureTime: row.departure_time,
stopSequence: toInteger(row.stop_sequence)})-[:STOPS_AT]->(s)
} IN TRANSACTIONS OF 10 ROWS;
… Added 351388 labels, created 351388 nodes, set 1054164 properties, created 702776 relationships, completed after 1364220 ms.
As you can see, this took a while. But now we have all nodes in place:
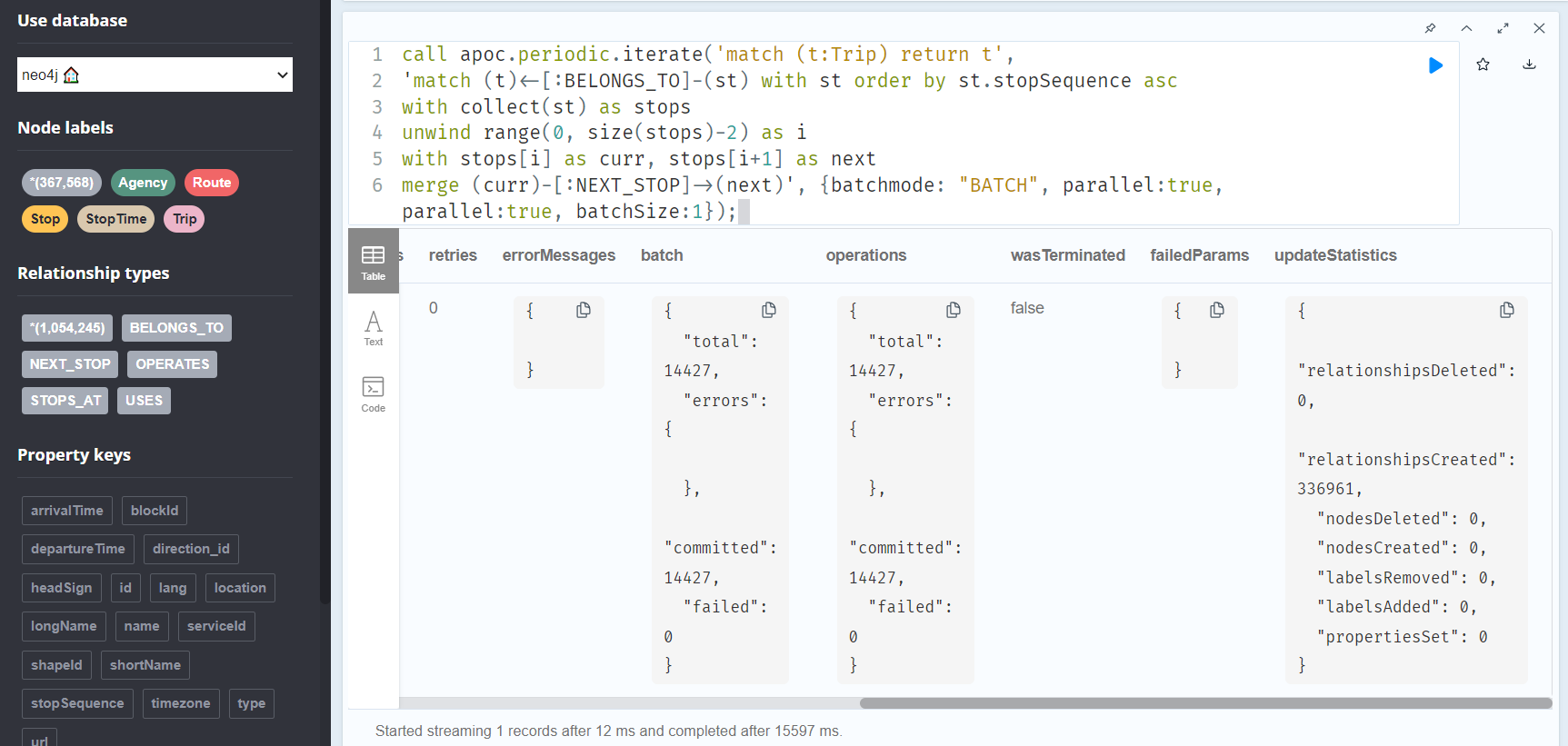
The final statement adds additional relationships between consecutive stop times:
call apoc.periodic.iterate('match (t:Trip) return t',
'match (t)<-[:BELONGS_TO]-(st) with st order by st.stopSequence asc
with collect(st) as stops
unwind range(0, size(stops)-2) as i
with stops[i] as curr, stops[i+1] as next
merge (curr)-[:NEXT_STOP]->(next)', {batchmode: "BATCH", parallel:true, parallel:true, batchSize:1});
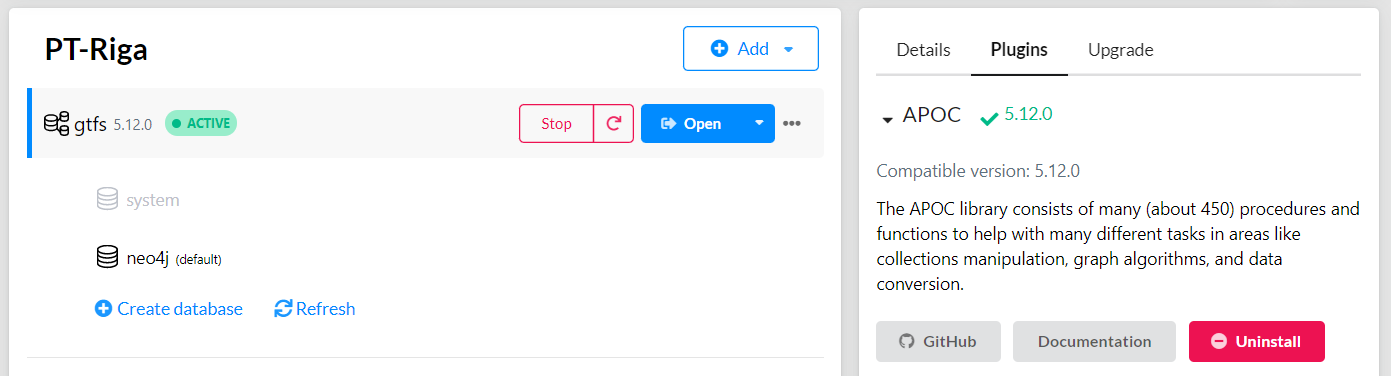
This fails with: There is no procedure with the name apoc.periodic.iterate registered for this database instance. Please ensure you've spelled the procedure name correctly and that the procedure is properly deployed.
So, let’s install APOC. That’s a plugin which we can install into our database from within Neo4J Desktop:
After restarting the db, we can run the query:
No errors. Sounds good.
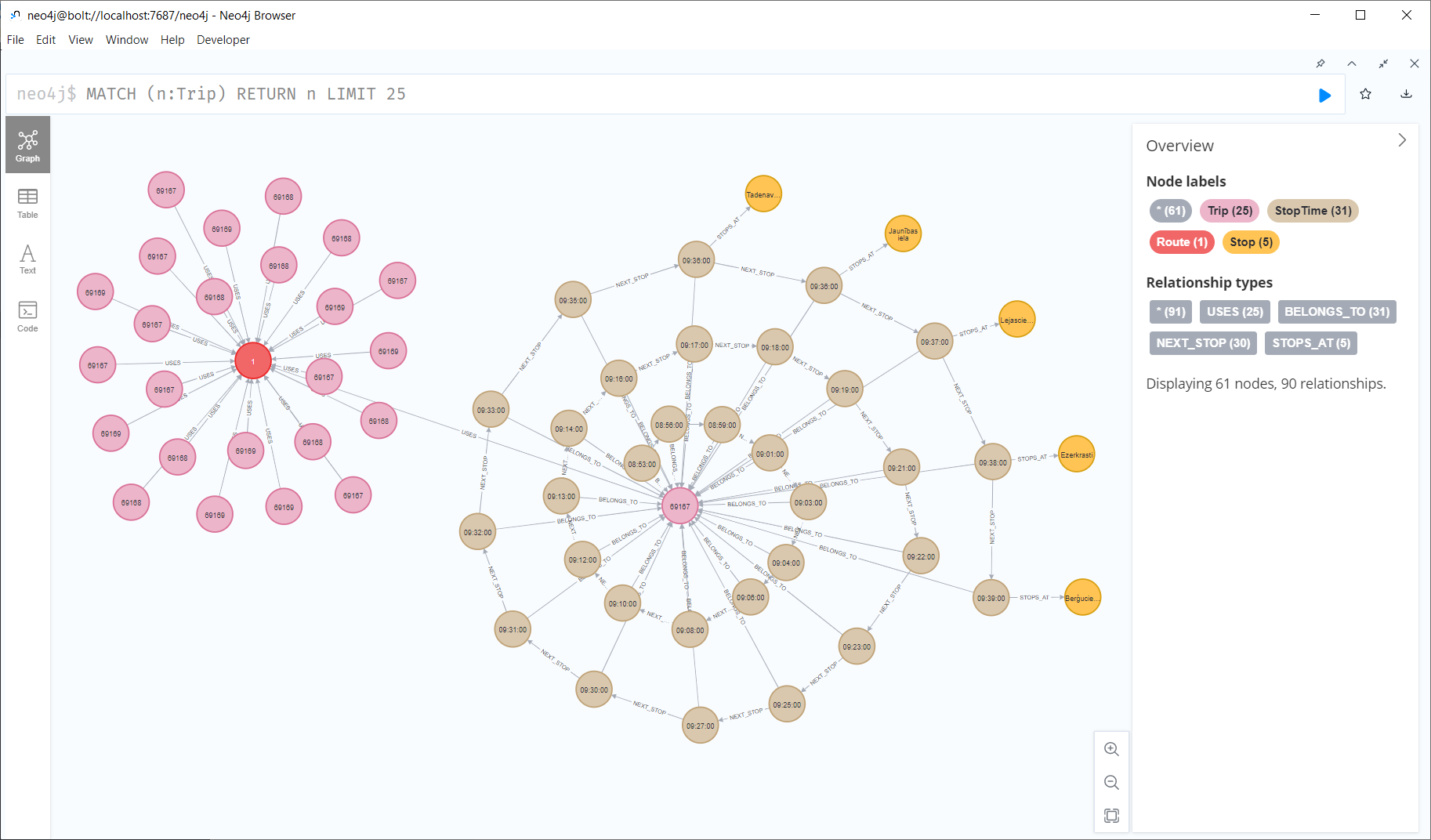
Let’s have a look at what we ended up with. Here are 25 random Trips. I expanded one of them to show its associated StopTimes. We can see the relations between consecutive StopTimes and I’ve expanded the final five StopTimes to show their linked Stops:
I also wanted to visualize the stops on a map. And there used to be a neat app called Neomap which can be installed easily:
Earlier this year, in collaboration with North Road we were awarded a grant from Cesium to introduce 3D tiles support in QGIS. The feature was developed successfully and shipped with QGIS 3.34.
In this blog post, you can read more about how to work with this feature, where to get data and how to display your maps in 2D and 3D. For a video demo of this feature, you can watch Nyall Dawson’s presentation on Youtube.
What are 3D tiles?
3D tiles are a specification for streaming and rendering large-scale 3D geospatial datasets. They use a hierarchical structure to efficiently manage and display 3D content, optimising performance by dynamically loading appropriate levels of detail. This technology is widely used in urban planning, architecture, simulation, gaming, and virtual reality, providing a standardised and interoperable solution for visualising complex geographical data.
Examples of 3D tiles:
Data from Swisstopo (https://map.geo.admin.ch/)
Washington - 3D Surface Model (Vricon, Cesium)
3D tiles in QGIS
To be able to use 3D tiles in QGIS, you need to have QGIS 3.34 or later. You can add a new connection to a 3D tile service from within the Data Source Manager under Scene:
Adding a new 3D tile service from Data Source Manager in QGIS
Alternatively, you can add the service from your Browser Panel:
3D tiles data provider in the Browser panel
To test the feature, you can use the following 3D tiles service:
Name: 3D Tiles example
URL: https://pelican-public.s3.amazonaws.com/3dtiles/agi-hq/tileset.json
Creating a new connection to a 3D tiles service
You can then add the map from the newly generated connection to QGIS:
Adding a new 3D tiles to QGIS
By default, the layer is styled using texture, but you can change it to see the wireframe mesh behind the scene:
3D tiles’ mesh wireframe
You can change the mesh fill and line symbols similar to the vector polygons. Alternatively, you can use texture colors. This will render each mesh element with the average value of the full texture. This is ideal when dealing with a large dataset and want to get a quick overview of the data:
3D tiles with texture color for meshes
To view the data in 3D, you can open a new 3D map. Similar to 2D map, by zooming in/out, finer resolution tiles will be fetched and displayed:
Using data from Cesium ion
Cesium ion is a cloud-based platform for managing and streaming 3D geospatial data. It simplifies data management, visualisation, and sharing.
To add 3D tiles from Cesium ion, you need to first sign up to their service here:
https://ion.cesium.com/tokens
Under Asset Depot, you will see a catalogue of publicly available datasets. You can also upload your own 3D models (such as OBJ or PLY), georeference them and get them converted to 3D tiles.
You can also add one of the existing tile service under https://ion.cesium.com/assetdepot and select the tile service and then click on Add to my assets:
Adding an existing dataset to your Cesium ion assets
You can use the excellent Cesium ion plugin by North Road from the QGIS repository to add the data to QGIS:
Adding Cesium ion assets to QGIS
Working with Google 3D data
In addition to accessing Google Photorealistic 3D tiles from Cesium ion, you can also add the tiles directly in QGIS. First you will need to follow the instructions below and obtain API keys for 3D tiles:
https://developers.google.com/maps/documentation/tile/cloud-setup
During the registration process, you will be asked to add your credit card details. Currently (November 2023), they do not charge you for using the service.
Once you have obtained the API key, you can add Google tiles using the following connection details:
Adding Google Photorealistic tiles in QGIS
Notes and remarks
Adjusting map extents for large scenes
When dealing with large scenes, map extents should be set to a smaller area to be able to view it in 3D. This is the current limitation of QGIS 3D maps as it cannot handle scenes larger than 500 x 500 km.
To change the map extent, you can open Project Properties and under View Settings change the extent. In the example below, the map extent has been limited only to a part of London, so we can view Google Photorealistic tiles in the 3D map without rendering issues.
Limiting project extent in QGIS
3D tiles from Google in QGIS
Network cache size
If you are handling a large dataset, it is recommended to increase network cache size to 1 GB or more. The default value in QGIS is much lower and it results in slower rendering of the data.
Increasing Cache size in QGIS for faster rendering
Overlaying other 3D data
When you try to overlay other data sets on top of a global 3D tiles, the vertical datum might not match and hence you will see the data in the wrong place in a 3D map. To fix the issue, you may need to use elevation offsetting to shift the data along the Z axis under Layer Properties:
Offsetting elevation of a layer in QGIS
Future works
This is the first implementation of the 3D tiles in QGIS. For the future, we would like to add more features for handling and creation of the 3D tiles. Our wishlist in no particular order is:
Globe view: QGIS 3D cannot handle large scenes or unprojected views.
More advanced styling of meshes: as an example, users will be able to create their own style.
3D In-door navigation: as an example users will be able to navigate inside buildings and potentially it will bring BIM data closer to QGIS
Generation of 3D tiles inside QGIS: adding a processing tool in QGIS to generate 3D Tiles from your map data.
Styling of 3D tiles (image from https://cesium.com/learn/ion/stories-styling/)
If you would like to see those features in QGIS and want to fund the efforts, do not hesitate to contact us.
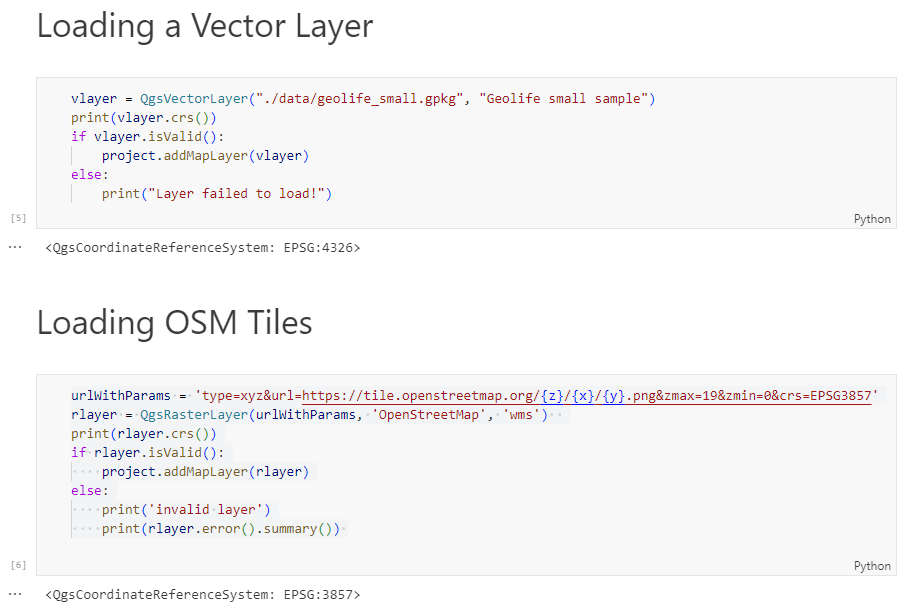
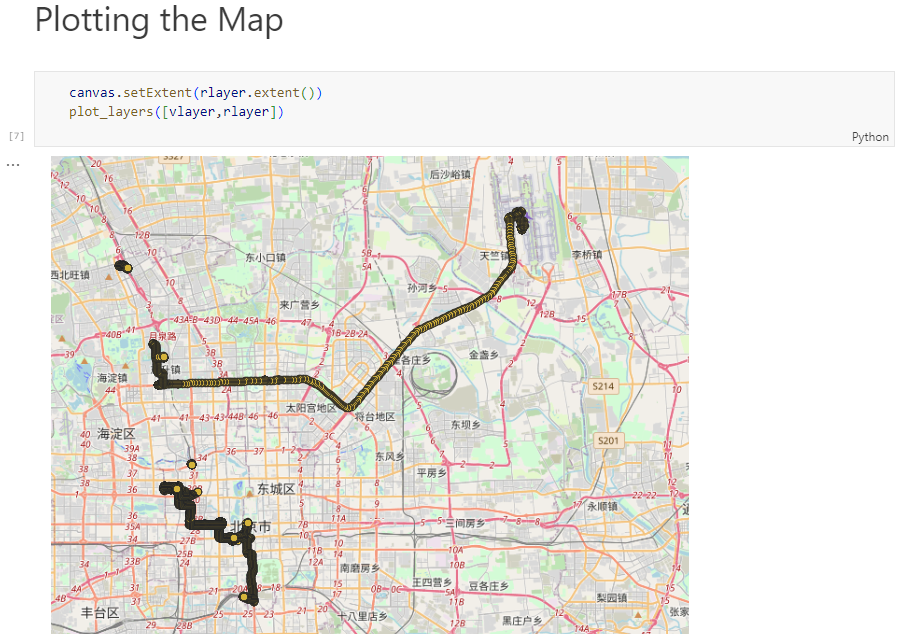
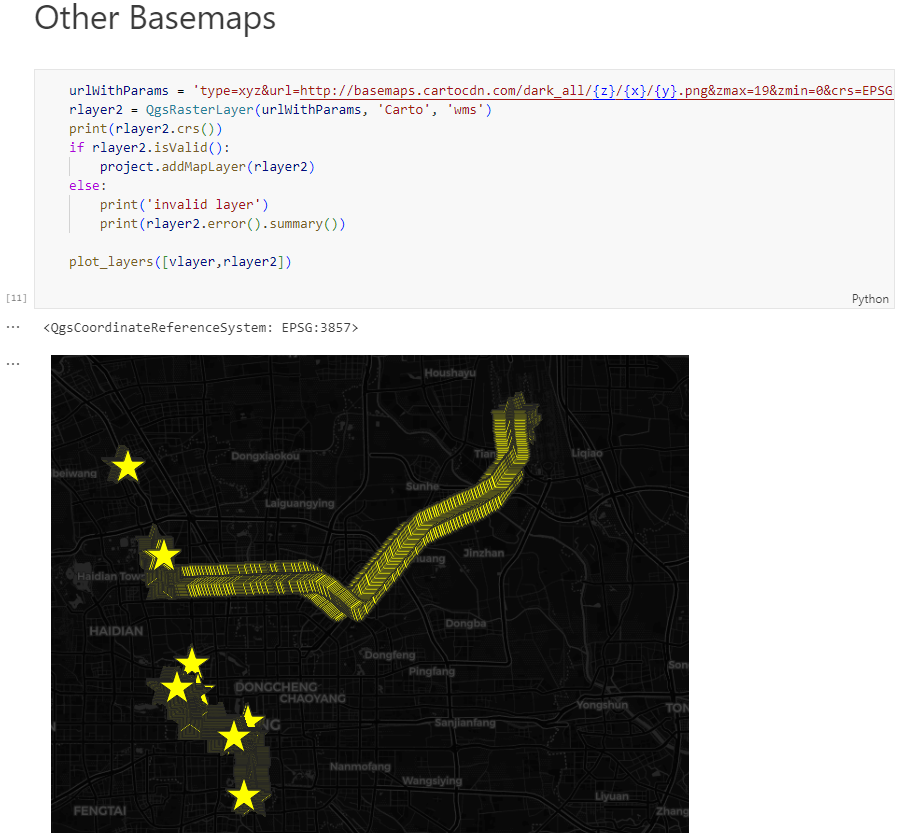
Today, we’ll take the next step and add basemaps to our maps. This is trickier than I would have expected. In particular, I was fighting with “invalid” OSM tile layers until I realized that my QGIS application instance somehow lacked the “WMS” provider.
In addition, getting basemaps to work also means that we have to take care of layer and project CRSes and on-the-fly reprojections. So let’s get to work:
from IPython.display import Image
from PyQt5.QtGui import QColor
from PyQt5.QtWidgets import QApplication
from qgis.core import QgsApplication, QgsVectorLayer, QgsProject, QgsRasterLayer, \
QgsCoordinateReferenceSystem, QgsProviderRegistry, QgsSimpleMarkerSymbolLayerBase
from qgis.gui import QgsMapCanvas
app = QApplication([])
qgs = QgsApplication([], False)
qgs.setPrefixPath(r"C:\temp", True) # setting a prefix path should enable the WMS provider
qgs.initQgis()
canvas = QgsMapCanvas()
project = QgsProject.instance()
map_crs = QgsCoordinateReferenceSystem('EPSG:3857')
canvas.setDestinationCrs(map_crs)
print("providers: ", QgsProviderRegistry.instance().providerList())
To add an OSM basemap, we use the xyz tiles option of the WMS provider:
Open source software projects thrive on the contributions of the community, not only for the code, but also for making the software accessible to a global audience. One of the critical aspects of this accessibility is the localization or translation of the software’s messages and interfaces. In this context, Weblate (https://weblate.org/) has proven to be […]
Earlier this year, we explored how to use PyQGIS in Juypter notebooks to run QGIS Processing tools from a notebook and visualize the Processing results using GeoPandas plots.
Today, we’ll go a step further and replace the GeoPandas plots with maps rendered by QGIS.
The following script presents a minimum solution to this challenge: initializing a QGIS application, canvas, and project; then loading a GeoJSON and displaying it:
from IPython.display import Image
from PyQt5.QtGui import QColor
from PyQt5.QtWidgets import QApplication
from qgis.core import QgsApplication, QgsVectorLayer, QgsProject, QgsSymbol, \
QgsRendererRange, QgsGraduatedSymbolRenderer, \
QgsArrowSymbolLayer, QgsLineSymbol, QgsSingleSymbolRenderer, \
QgsSymbolLayer, QgsProperty
from qgis.gui import QgsMapCanvas
app = QApplication([])
qgs = QgsApplication([], False)
canvas = QgsMapCanvas()
project = QgsProject.instance()
vlayer = QgsVectorLayer("./data/traj.geojson", "My trajectory")
if not vlayer.isValid():
print("Layer failed to load!")
def saveImage(path, show=True):
canvas.saveAsImage(path)
if show: return Image(path)
project.addMapLayer(vlayer)
canvas.setExtent(vlayer.extent())
canvas.setLayers([vlayer])
canvas.show()
app.exec_()
saveImage("my-traj.png")
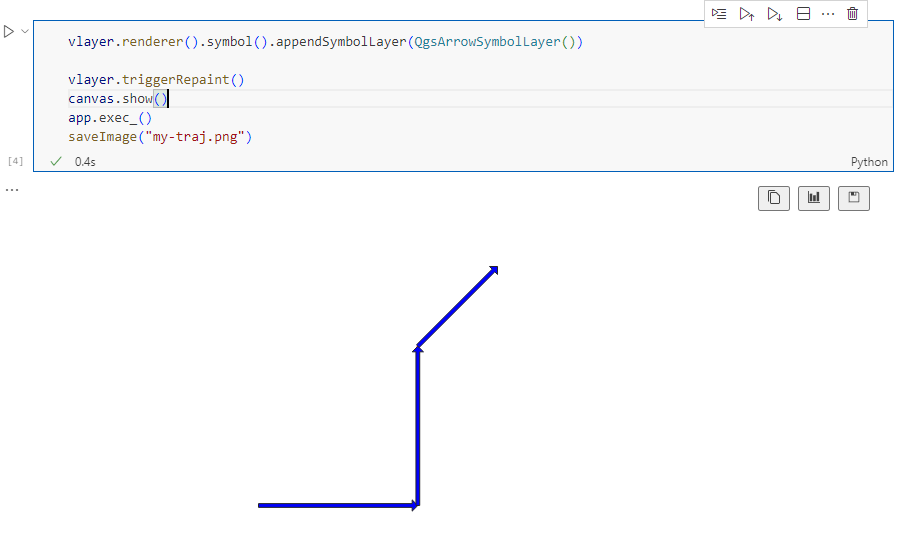
When this code is executed, it opens a separate window that displays the map canvas. And in this window, we can even pan and zoom to adjust the map. The line color, however, is assigned randomly (like when we open a new layer in QGIS):
We’ve recently had the opportunity to implement a very exciting feature in QGIS 3.34 — the ability to load and view 3D content in the “Cesium 3D Tiles” format! This was a joint project with our (very talented!) partners at Lutra Consulting, and was made possible thanks to a generous ecosystem grant from the Cesium project.
Before we dive into all the details, let’s take a quick guided tour showcasing how Cesium 3D Tiles work inside QGIS:
What are 3D tiles?
Cesium 3D Tiles are an OGC standard data format where the content from a 3D scene is split up into multiple individual tiles. You can think of them a little like a 3D version of the vector tile format we’ve all come to rely upon. The 3D objects from the scene are stored in a generalized, simplified form for small-scale, “zoomed out” maps, and in more detailed, complex forms for when the map is zoomed in. This allows the scenes to be incredibly detailed, whilst still covering huge geographic regions (including the whole globe!) and remaining responsive and quick to download. Take a look at the incredible level of detail available in a Cesium 3D Tiles scene in the example below:
Where can you get 3D tile content?
If you’re lucky, your regional government or data custodians are already publishing 3D “digital twins” of your area. Cesium 3D Tiles are the standard way that these digital twin datasets are being published. Check your regional data portals and government open data hubs and see whether they’ve made any content available as 3D tiles. (For Australian users, there’s tons of great content available on the Terria platform!).
Alternatively, there’s many datasets available via the Cesium ion platform. This includes global 3D buildings based on OpenStreetMap data, and the entirety of Google’s photorealistic Google Earth tiles! We’ve published a Cesium ion QGIS plugin to complement the QGIS 3.34 release, which helps make it super-easy to directly load datasets from ion into your QGIS projects.
Lastly, users of the OpenDroneMap photogrammetry application will already have Cesium 3D Tiles datasets of their projects available, as 3D tiles are one of the standard outputs generated by OpenDroneMap.
Why QGIS?
So why exactly would you want to access Cesium 3D tiles within QGIS? Well, for a start, 3D Tiles datasets are intrinsically geospatial data. All the 3D content from these datasets are georeferenced and have accurate spatial information present. By loading a 3D tiles dataset into QGIS, you can easily overlay and compare 3D tile content to all your other standard spatial data formats (such as Shapefiles, Geopackages, raster layers, mesh datasets, WMS layers, etc…). They become just another layer of spatial information in your QGIS projects, and you can utilise all the tools and capabilities you’re familiar with in QGIS for analysing spatial data along with these new data sources.
One large drawcard of adding a Cesium 3D Tile dataset to your QGIS project is that they make fantastic 3D basemaps. While QGIS has had good support for 3D maps for a number of years now, it has been tricky to create beautiful 3D content. That’s because all the standard spatial data formats tend to give generalised, “blocky” representations of objects in 3D. For example, you could use an extruded building footprint file to show buildings in a 3D map but they’ll all be colored as idealised solid blocks. In contrast, Cesium 3D Tiles are a perfect fit for a 3D basemap! They typically include photorealistic textures, and include all types of real-world features you’d expect to see in a 3D map — including buildings, trees, bridges, cliffsides, etc.
What next?
If you’re keen to learn even more about Cesium 3D Tiles in QGIS, you can check out the recent “QGIS Open Day” session we presented. In this session we cover all the details about 3D tiles and QGIS, and talk in depth about what’s possible in QGIS 3.34 and what may be coming in later releases.
Otherwise, grab the latest QGIS 3.34 and start playing…. you’ll quickly find that Cesium 3D Tiles are a fun and valuable addition to QGIS’ capabilities!
Our thanks go to Cesium and their ecosystem grant project for funding this work and making it possible.
Today’s post is a first quick dive into Neo4J (really just getting my toes wet). It’s based on a publicly available Neo4J dump containing mobility data, ship trajectories to be specific. You can find this data and the setup instructions at:
I was made aware of this work since they cited MovingPandas in their paper in Data & Knowledge Engineering: “The implementation combines several open source tools such as Python, MovingPandas library, Uber H3 index, Neo4j graph database management system”
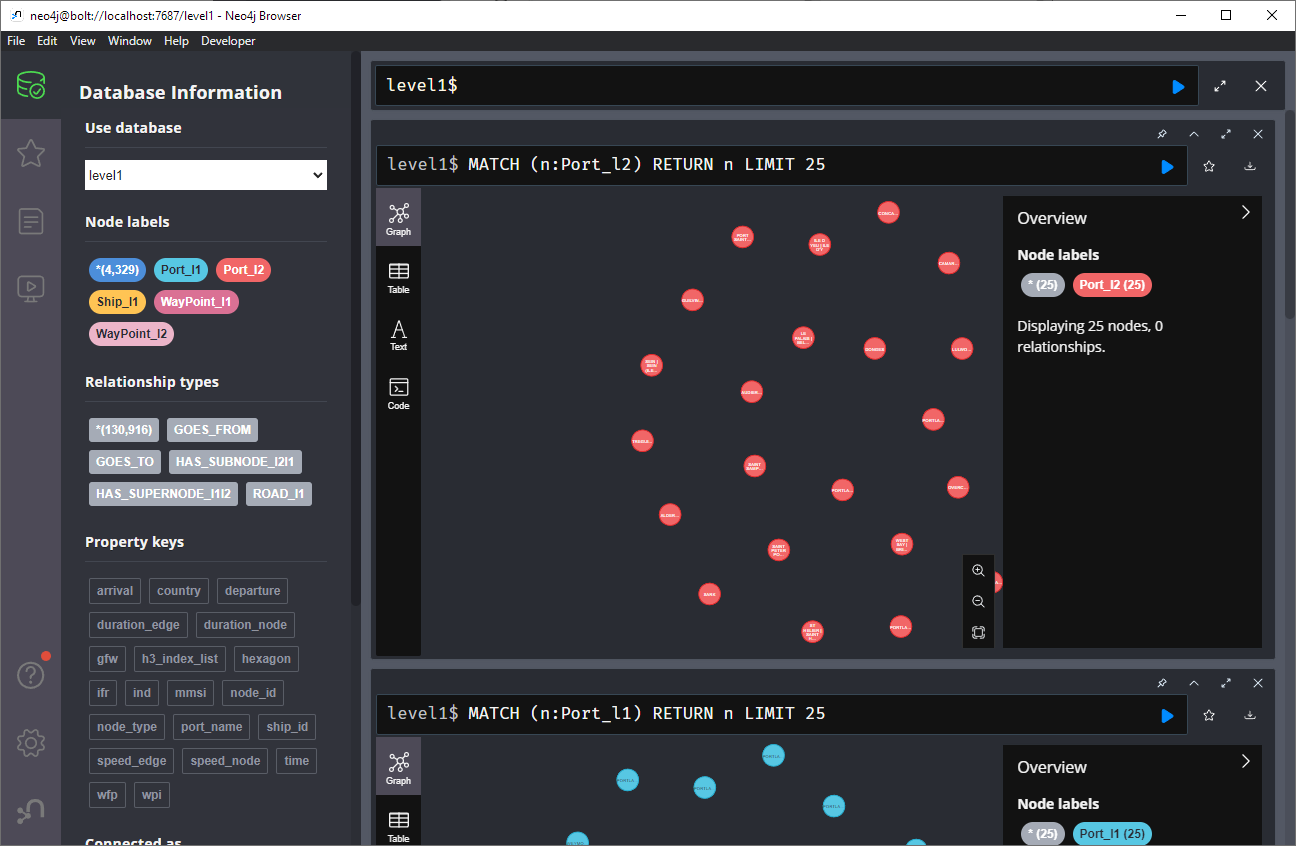
Once set up, this gives us a database with three hierarchical levels:
Neo4j comes with a nice graphical browser that lets us explore the data. We can switch between levels and click on individual node labels to get a quick preview:
Level 2 is a generalization / aggregation of level 1. Expanding the graph of one of the level 2 nodes shows its connection to level 1. For example, the level 2 port node “Audierne” actually refers to two level 1 nodes:
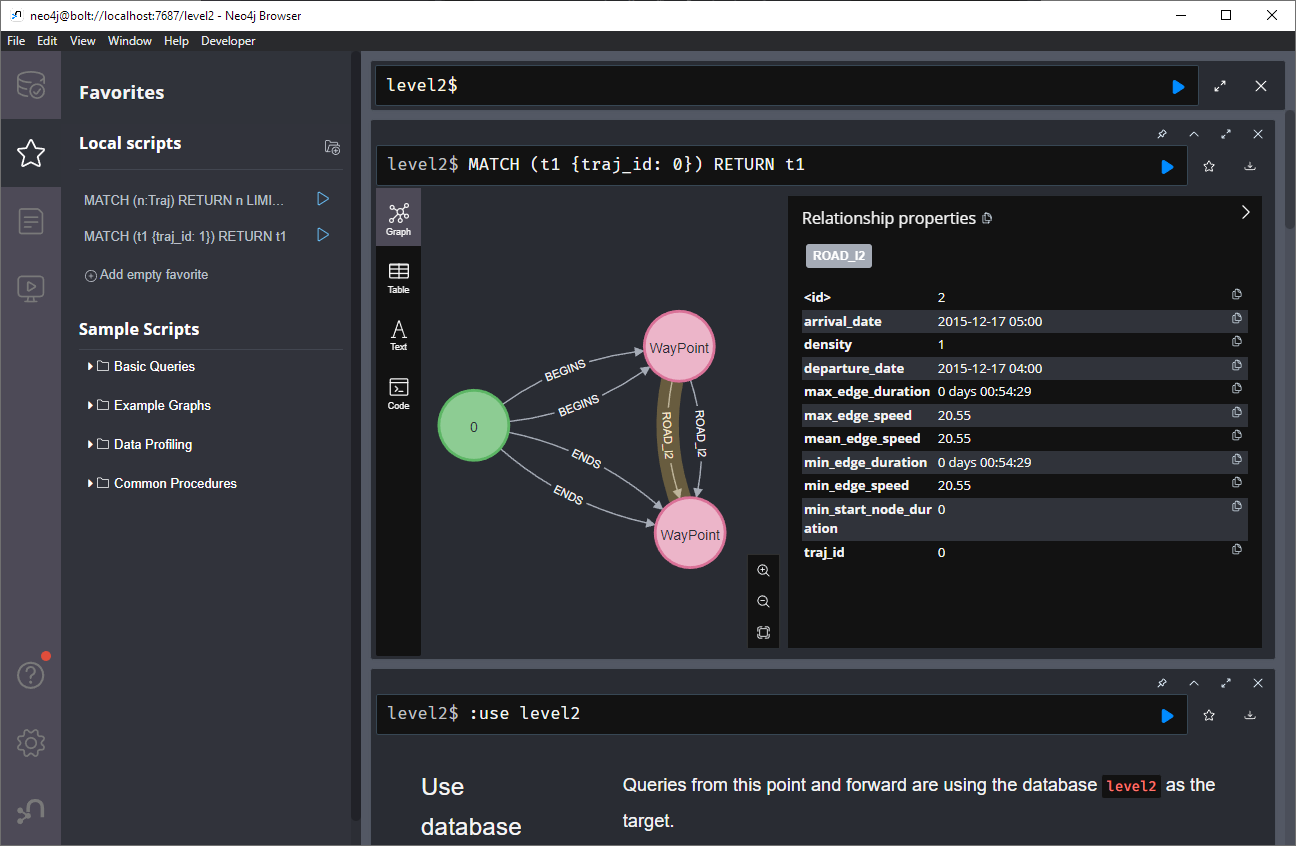
Every “road” level 1 relationship between ports provide information about the ship, its arrival, departure, travel time, and speed. We can see that this two level 1 ports must be pretty close since travel times are only 5 minutes:
Further expanding one of the port level 1 nodes shows its connection to waypoints of level1:
Switching to level 2, we gain access to nodes of type Traj(ectory). Additionally, the road level 2 relationships represent aggregations of the trajectories, for example, here’s a relationship with only one associated trajectory:
There are also some odd relationships, for example, trajectory 43 has two ends and begins relationships and there are also two road relationships referencing this trajectory (with identical information, only differing in their automatic <id>). I’m not yet sure if that is a feature or a bug:
On level 1, we also have access to ship nodes. They are connected to ports and waypoints. However, exploring them visually is challenging. Things look fine at first:
But after a while, once all relationships have loaded, we have it: the MIGHTY BALL OF YARN ™:
I guess this is the point where it becomes necessary to get accustomed to the query language. And no, it’s not SQL, it is Cypher. For example, selecting a specific trajectory with id 0, looks like this:
We are pleased to announce the release of QGIS 3.34 Prizren!
Installers for Windows and Linux are already out. QGIS 3.34 comes with tons of new features, as you can see in our visual changelog. QGIS 3.34 Prizren is named after this year’s FOSS4G host city.
We would like to thank the developers, documenters, testers and all the many folks out there who volunteer their time and effort (or fund people to do so). From the QGIS community we hope you enjoy this release! If you wish to donate time, money or otherwise get involved in making QGIS more awesome, please wander along to qgis.org and lend a hand!
QGIS is supported by donors and sustaining members. A current list of donors who have made financial contributions large and small to the project can be seen on our donors list. If you would like to become a sustaining member, please visit our page for sustaining members for details. Your support helps us fund our six monthly developer meetings, maintain project infrastructure and fund bug fixing efforts.
QGIS is Free software and you are under no obligation to pay anything to use it – in fact we want to encourage people far and wide to use it regardless of what your financial or social status is – we believe empowering people with spatial decision making tools will result in a better society for all of humanity.
Recently, we had the pleasure of helping organise the FOSS4G SotM Oceania 2023 conference in Auckland. It was a fantastic week and felt like a worthy return to pre-covid events full of great presentations, catching up with old friends, making new ones, and of course – delicious food! The venue, Auckland University of Technology, put on a really professional event with catering, venue spaces and their Audio Visual operations. Auckland gave us great weather, and great venues to enjoy each others company in.
We were blown away with the variety of presentations and the talent our Oceania region holds. We got to meet some of our clients in person including Koordinates, A.B. Heritage and Soar, which we loved, plus we spent valuable time connecting with our community.
At North Road we are passionate about supporting open-source and our local Oceania region, so we took an active part in making this year’s conference happen. Aside from being a conference sponsor, our very own powerhouse Emma Hain worked tirelessly as Program Chair to organise the conference program and ensure that the talks ran smoothly and were of very high value. Nyall ran a workshop for Advanced Cartography, presented on his journey in the FOSS4G workspace and contributed as panel member on making a living in FOSS4G. Emma also presented a lightning talk on GitHub QGIS Issues and was a community day facilitator on an exciting project to develop digital stories with a map component. We really love community and being involved in “building it” is integral. But it is also super fun as well!
One of the great things about this conference is the legacy it leaves, not only in the relationships formed, but in the recordings of all the presentations that end up on the FOSS4G Oceania YouTube channel. This is not only knowledge captured for the community, but also a showcase for the talent that exists in FOSS4G. Not every presentations was technical or about case studies, they also covered personal observations, hobbies and general mapping topics.
You can view the presentations from our staff below:
Also, check out the presentations from some of the great companies we have worked with:
On the last day of the conference we attended the Community Day. This involves a Mapathon run by HOTOSM, and rooms for brainstorming and workshopping of ideas. These were really valuable! First we attended the FOSS4G Hui run by Byron Cochrane from OpenWork (one of the conference sponsors). It was a great discussion on how to make FOSS4G more relevant in Oceania. If you are keen to help out with this, contact the OSGeo Oceania Board – as they need helpers with Communications and members to espouse FOSS4G at outside conferences.
Emma also ran the session on developing digital stories with a map component in a FOSS4G environment. This was well attended with a lot of ideas. We developed our MVP and we are now looking at our next steps. The question here is do we develop a new tool within existing software, find a standalone software where we could add in a map component, or approach a current OS Story Map software and provide our MVP and find funding. If you’re keen to take part in these discussions, you can join in on the Maptime Oceania slack channel under #foss4g-productdev.
A Big Thank-you!
The Organisation committee worked so hard on putting this conference on, and we would like to express our heartfelt thanks for this. This is the keystone event for our community and so much grows from this. Without the Organisation Committee’s sweat, tears, frustration and joy this would not have happened. We thank their families who supported them whilst they gave up their valuable time and their employers who supported them to give their time and effort to making this special event happen.














")